Hand-Auge-Kalibrierung für Roboter automatisieren

Kameragestützte Robotersysteme sind heute ein zentraler Bestandteil moderner Produktions- und Montageprozesse. In Bereichen wie Maschinen- und Anlagenbau, Automatisierungs- oder Medizintechnik sollen Roboter Bauteile zuverlässig montieren und demontieren können. Damit dies gelingt, müssen Roboter und Kamera, ähnlich wie beim Zusammenspiel von Auge und Hand beim Menschen, präzise aufeinander kalibriert sein, sonst greift ein Roboter daneben.
Stand der Technik
Bisher erfolgt die sogenannte Hand-Auge-Kalibrierung häufig manuell: Bedienende Personen fahren einzelne Roboterpositionen an, erfassen Bilddaten und bestimmen daraus die genaue Lage des Werkzeugs, etwa eines Greifers oder Schraubers. Die erreichbare Genauigkeit hängt dabei stark von der Erfahrung des Bedienenden und der Auswahl der Messpunkte ab. Externe Messsysteme wie Lasertracker oder Koordinatenmessgeräte können zwar sehr präzise Daten liefern, sind jedoch mit hohen Kosten verbunden.
Technologie
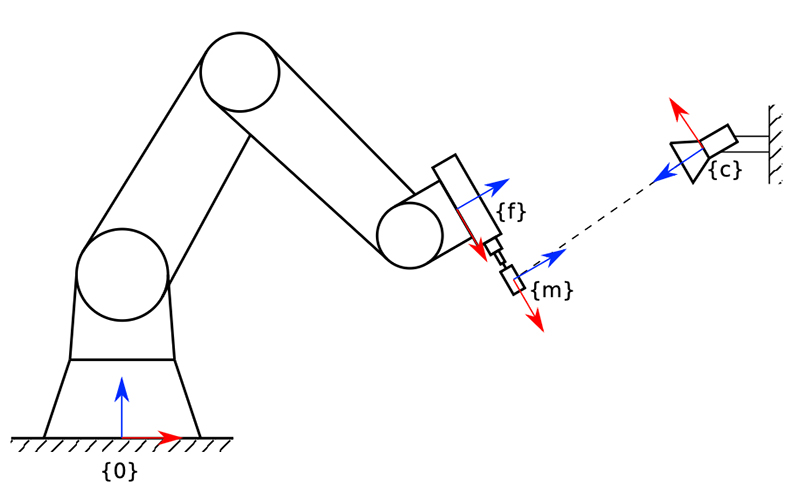
Forschenden der Digital Process Engineering (DPE) Gruppe des Instituts für Mechanische Verfahrenstechnik und Mechanik (MVM) des KIT ist es gelungen, ein Verfahren zu entwickeln, das die Hand-Auge-Kalibrierung automatisiert und mathematisch optimiert. Grundlage ist ein digitales Modell von Roboter und Kamera, das ihre Bewegungs- und Lagebeziehungen zueinander exakt beschreibt. Darauf basierend berechnet ein Algorithmus eine für die Kalibrierung optimierte kontinuierliche Bewegungsbahn (Trajektorie), die der Roboter selbstständig abfährt. Im realen Demonstrator erfasst eine Kamera über einen optischen Marker am Werkzeug kontinuierlich dessen Lage, während der Roboter gleichzeitig die Werkzeugposition protokolliert. Aus diesen synchronen Daten berechnet das System die exakte räumliche Beziehung zwischen Kamera, Roboter und Werkzeug. Dabei bewertet das System zusätzlich statistisch die erzielte Genauigkeit.
Vorteile
Das Verfahren arbeitet vollautomatisch und liefert präzise sowie reproduzierbare Ergebnisse – unabhängig von der Erfahrung des Bedienenden. Es eignet sich sowohl für stationäre als auch für am Roboter montierte Kamerasysteme. Zudem lässt es sich in bestehende Anlagen integrieren und ermöglicht die Nachrüstung von Bestandsrobotern für neue visuelle Anwendungen.
Optionen für Unternehmen
Ein Demonstrator ist im Aufbau. Das KIT sucht Partner für anwendungsspezifische Entwicklungsprojekte und die Lizenzierung der Technologie.
Bilder zur Technologie schließen öffnen
Ihr Ansprechpartner für dieses Angebot

Innovationsmanager Neue Materialien und Gesundheitstechnologien Karlsruher Institut für Technologie (KIT)
Innovations- und Relationsmanagement (IRM) Telefon: +49 721 608-26107
E-Mail: jan-niklas.bloetz@kit.edu