Roboter mit Hand-Arm-Modell testet Power-Tools

Handgehaltene Power-Tools wie Bohrhammer, Schlagschrauber oder Winkelschleifer kommen auf Baustellen, beim Heimwerken und auch im Haushalt zum Einsatz. Genutzt werden sie von den unterschiedlichsten Personen: Profis und Laien, großen und kleinen, kräftigen und nicht so kräftigen. Diese Varianz müssen Firmen bei der Entwicklung ihrer Produkte berücksichtigen.
Stand der Technik
Die auf die Werkzeuge aufgebrachten Kräfte der Anwendenden während des Betriebs haben einen wesentlichen Einfluss auf die Funktionsweise und Leistungsfähigkeit von Power-Tools. Deshalb werden Prototypen Belastungstest unterzogen, bei denen unterschiedliche Kraftstufen, das Verhalten während der Bearbeitung diverser Materialien und das Arbeiten in verschiedenen Raumrichtungen untersucht werden. Bislang werden diese meist manuell von Menschen durchgeführt. Zwar wird die Nutzerbandbreite durch verschiedene Testpersonen abgebildet, jedoch ist es schwierig, ein und dieselbe Arbeitsaufgabe mehrmals hintereinander exakt gleich durchzuführen. Folglich ergibt sich eine weite Streuung der Testergebnisse und große Unsicherheit durch individuelle Einflüsse.
Technologie
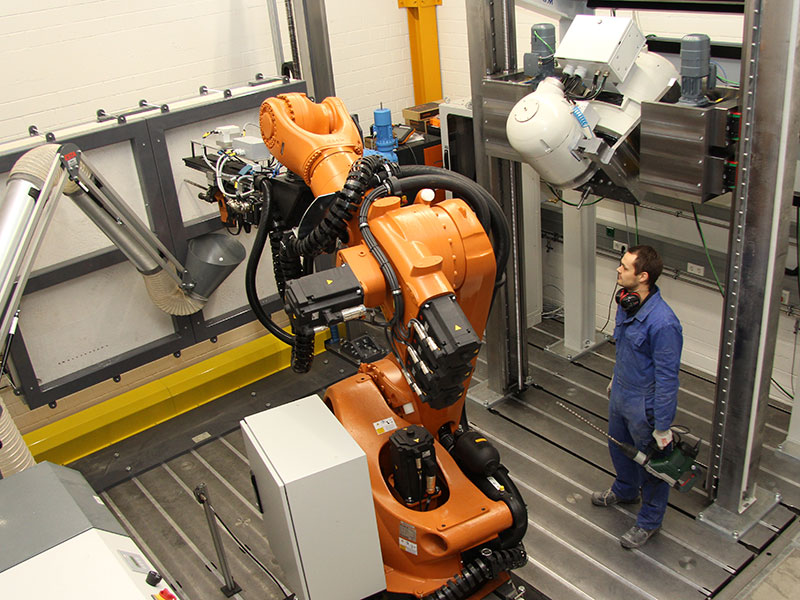
Ein Prüffeld am IPEK-Institut für Produktentwicklung des KIT adressiert diese Herausforderungen in der Forschung. Am Prüfstand übernimmt ein Industrieroboter die Rolle der Testpersonen. Das Besondere: Der Roboter ist zum Menschen wirkungsäquivalent. Ein mechanisches Hand-Arm-Modell bildet Dynamik, Nachgiebigkeit, Dämpfung und Trägheit ab, die vom Menschen über seinen Bewegungsapparat auf das Werkzeug wirken. Somit entstehen im Versuch die gleichen Belastungen für das zu testende Gerät, wie wenn es ein Mensch führen würde. Jedoch können unterschiedliche Anwendende und Nutzungssituationen gezielt nachgebildet werden. Gespeist wird der Roboter mit Messdaten unterschiedlichster Personen, die vorab mithilfe manueller Versuche und eines Shaker-Systems wissenschaftlich untersucht werden.
Vorteile
Power-Tools können auf dem Roboter-Prüfstand unter variablen, dabei aber reproduzierbaren Konditionen getestet werden. Bei weniger Versuchsdurchläufen und großer Zeitersparnis entstehen dabei weniger Streuung und reproduzierbarere Ergebnisse als bei den von Menschen durchgeführten Tests. Geräteverhalten im Dauerbetrieb sowie unter extremen Temperatureinflüssen wird ebenso erforscht.
Optionen für Unternehmen
Unternehmen können das Prüffeld für gemeinsame Forschungsprojekte mit dem KIT nutzen, um ihre Power-Tool-Prototypen forschungsgetrieben zu testen sowie die Ergonomie, Leistungsfähigkeit und Krafteffizienz zu verbessern.
Bilder zur Technologie schließen öffnen

Ihr Ansprechpartner für dieses Angebot

Innovationsmanager Mobilität und Information Karlsruher Institut für Technologie (KIT)
Innovations- und Relationsmanagement (IRM) Telefon: +49 721 608-25335
E-Mail: julia.rast@kit.edu
